外型紧凑、重量更轻:
能实现稳定的上下料作,
专用的上下料机器人。
轻量型机器人:
外形小巧、重量轻,高速、高精度
完成上下料、分拣、装配工作。

更灵敏:
灵敏力感知,高速作业;
可进行搬运、码垛、装配等作业。
结构精简:
故障率低、占地面积小,
小型码垛机器人中的精英。

更简便:
采用4轴设计,
零基础图形化操作。
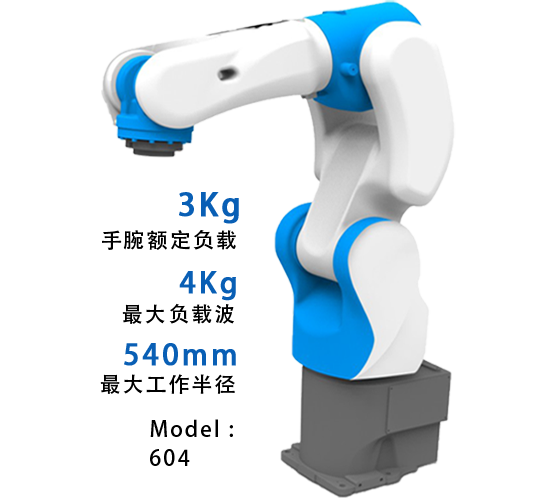
| 负载 | 4kg | 重量 | 约28kg | 自由度 | 6 |
|---|---|---|---|---|---|
| 最大工作半径 | 540mm | 防护等级 | IP54 | 功耗 | 平均 200w / 峰值 400w |
| 重复定位精度 | ±0.05mm | 力测量分辨率 | 0.1N,0.02Nm | 力控相对精度 | 0.5N,0.1Nm |
| 笛卡尔刚度可调范围 | 0~3000N/m,0~500N/rad | ||||
| 运 动 参 数 |
轴 | 运动范围 | 最大速度 | 最大力矩 |
|---|---|---|---|---|
| J1 | ±170° | 370°/s | 35Nm | |
| J2 | ±110° | 137°/s | 35Nm | |
| J3 | +40°/-120° | 430°/s | 35Nm | |
| J4 | ±185° | 300°/s | 24Nm | |
| J5 | ±125° | 460°/s | 24Nm | |
| J6 | ±360° | 600°/s | 24Nm |
| 负载 | 6kg | 重量 | 约30kg | 自由度 | 6 |
|---|---|---|---|---|---|
| 最大工作半径 | 720mm/910mm | 防护等级 | IP54 | 功耗 | 平均 500w / 峰值 900w |
| 重复定位精度 | ±0.05mm | 工作温度 | 0-40℃ | 力控相对精度 | ±0.05mm |
| 笛卡尔刚度可调范围 | 0~3000N/m,0~500N/rad | ||||
| 运 动 参 数 |
轴 | 运动范围 | 最大速度 | 最大力矩 |
|---|---|---|---|---|
| J1 | ±170° | 370°/s | 24Nm | |
| J2 | ±110° | 370°/s | 24Nm | |
| J3 | "+40°/-220 | 430°/s | 35Nm | |
| J4 | ±185° | 300°/s | 24Nm | |
| J5 | ±120° | 460°/s | 35Nm | |
| J6 | ±360° | 460°/s | 35Nm |
| 负载 | 6~8kg | 重量 | 135kg | 自由度 | 6 |
|---|---|---|---|---|---|
| 最大工作半径 | 1400mm | 防护等级 | IP54 | 功耗 | 平均 300w / 峰值 500w |
| 重复定位精度 | ±0.05mm | 工作温度 | 0-40℃ | 力控相对精度 | 0.5N,0.1Nm |
| 笛卡尔刚度可调范围 | 0~3000N/m,0~500N/rad | ||||
| 运 动 参 数 |
轴 | 运动范围 | 最大速度 | 最大力矩 |
|---|---|---|---|---|
| J1 | ±165° | 150°/s | 10.2Nm | |
| J2 | "+155°/-90 | 150°/s | 10.2Nm | |
| J3 | "+70°/-220° | 160°/s | 6.2Nm | |
| J4 | ±170° | 300°/s | 10.2Nm | |
| J5 | ±120° | 320°/s | 10.2Nm | |
| J6 | ±360° | 360°/s | 10.2Nm |
| 负载 | 额定16~20kg | 重量 | 约268kg | 自由度 | 6 |
|---|---|---|---|---|---|
| 最大工作半径 | 1717mm | 防护等级 | IP54 | 功耗 | 平均 600w / 峰值 1000w |
| 重复定位精度 | ±0.06mm | 工作温度 | 0-40℃ | 力控相对精度 | 0.5N,0.1Nm |
| 笛卡尔刚度可调范围 | 0~3000N/m,0~500N/rad | ||||
| 运 动 参 数 |
轴 | 运动范围 | 最大速度 | 最大力矩 |
|---|---|---|---|---|
| J1 | ±180° | 197°/s | 42Nm | |
| J2 | "+155°/-110° | 175°/s | 42Nm | |
| J3 | "+255°/-165° | 187°/s | 21Nm | |
| J4 | ±200° | 400°/s | 42Nm | |
| J5 | ±120° | 400°/s | 42Nm | |
| J6 | ±360° | 600°/s | 21Nm |
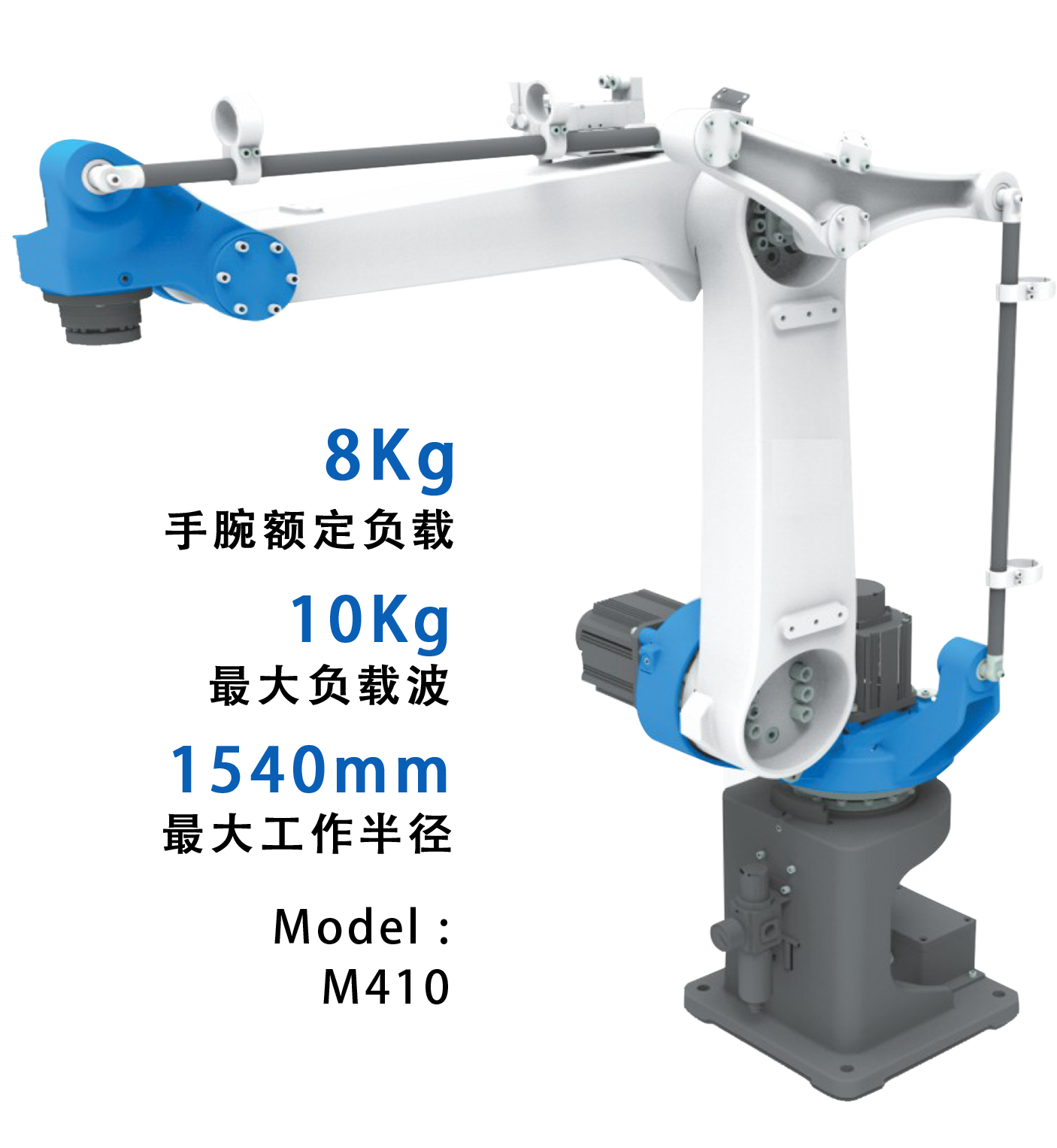
| 负载 | 额定8~10kg | 重量 | 180kg | 自由度 | 4 |
|---|---|---|---|---|---|
| 最大工作半径 | 1540mm | 防护等级 | IP54 | 功耗 | 平均 600w / 峰值 1000w |
| 重复定位精度 | ±0.06mm | 工作温度 | 0-40℃ | 力控相对精度 | 0.5N,0.1Nm |
| 笛卡尔刚度可调范围 | 0~3000N/m,0~500N/rad | ||||
| 运 动 参 数 |
轴 | 运动范围 | 最大速度 | 最大力矩 |
|---|---|---|---|---|
| J1 | ±180° | 204°/s | - | |
| J2 | +90°/-45° | 202°/s | - | |
| J3 | "+95°1-0° | 202°/s | - | |
| J4 | ±360° | 300°/s | - |
| 控制柜 | 本体集成控制器 / 独立控制柜 | 人机交互设备 | 笔记本 / 拖动操控抓手 | 安全设备 | 手持使能1路 / 手持急停1路 |
|---|---|---|---|---|---|
| 底座接口 | Ethernet 2路 / EtherCAT 1路 / RS485 / DIO | 末端接口 | EtherCAT 1路 / 电源24V / RS485 / DIO | ||
| 功 能 配 置 |
7-Dof运动控制 | 肘部 / 冗余最大工作半径动态调整 |
|---|---|---|
| 拖动示教功能 | 拖动方式:笛卡尔空间 / 轴空间;示教方式:点位/连续轨迹 | |
| 高动态力控 | 笛卡尔空间 / 轴空间阻抗控制;力控搜索运动规划 | |
| 安全监控 | 参照ISO13849,PL. d, Cat 3安全功能设计 | |
| 外部控制接口 | 支持高动态外部控制;底层力 / 位置控制接口;机器人模型库及API |
商务咨询:15817632209(肖先生)
合作洽谈:18027085493(黄先生)
: 13538365202(黄先生)
社招简历投递:303218004@qq.com
商务合作沟通:18027085493@sina.cn
机器人生产中心:广东省东莞市横沥镇山厦管理区祥和路29号
机器人研发中心:广东省东莞市横沥镇新城工业区兴业路199号
教育培训中心:广东省东莞市横沥镇新城工业区兴业路199号